不定形の軟包材も確実に吸着するロボット吸着ハンド
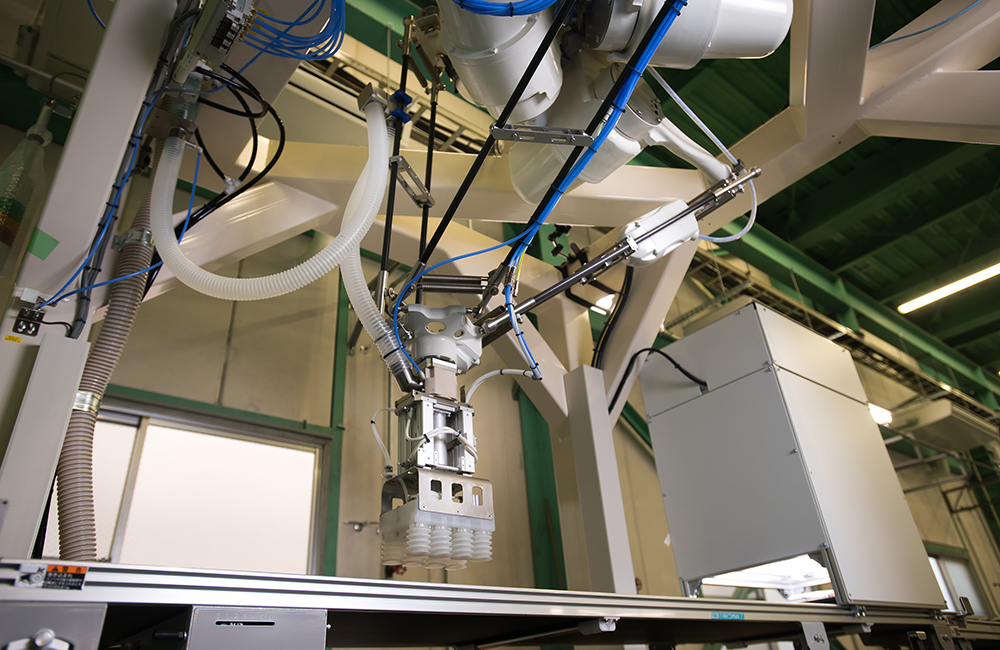
集積装置に代わり吸着ハンドが対象物を箱詰め形態に集積
-

-
多種多様な集積形態に対応可
機械化が困難な軟包材や液体袋等の不定形な物体の詰込み作業を可能にする、同社オリジナルのロボット吸着ハンド(特許取得済)は、一度の動作で最大3個を同時に集積でき、さらに吸着ハンド自体で田の字千鳥配列、90度反転などの形態に集積することも可能。
-

-
正確なトラッキングで確実に制御
ロボット吸着ハンドのヘッドは、複数の吸着用パットで形成されたダストボックスと、吸着部を開閉する開閉弁で構成されている。プログラムにより開閉弁を操作し、ダストボックス内の負圧状態を制御することで、対象物を個別に、かつ指定順に吸着できる。
-

-
重量のある軟包材の集積にも対応
アルミとポリプロピレンで構成された、ロボット吸着ハンドのヘッド自体も軽量化を実現。液体パウチなどの重量のある軟包材の詰込みについて、荷崩れを防ぐサイド挿入式セットアップケーサー(特許取得済)と組み合わせれば、より一層効率的に集積できる。
企業紹介動画
COMPANY MOVIE
※別ウインドが開きます

企業情報
COMPANY INFORMATION
大和エンジニアリング株式会社
| 住所 | 〒791-3131 愛媛県伊予郡松前町北川原2034 |
|---|---|
| 電話番号 | 089-984-4432 |
| FAX番号 | 089-984-4877 |
| URL | https://www.daiwa-eng.com |
| 設 立 | 平成2年12月 |
| 資本金 | 3,000万円 |
| 代表者 | 代表取締役社長 中矢真吾 |
| 従業員数 | 72名 |
| 事業内容 | 各種段ボール外装機械の製造、 段ボール製函機、封函機、 ケーサー、パレタイザーの製造 |
| 事業所 | 東京、厚木、大阪、名古屋 |
| 売上高 | 23億5,000万円(令和7年5月期) |

検索
SUGOWAZA SEARCH
-
技術別検索
SEARCH BY TECHNOLOGY
-
-
業種別検索
SEARCH BY INDUSTRY
-
-
市町村別検索
SEARCH BY MUNICIPALITY
-
